Investigadores de ingeniería de la Universidad de Gifu en Japón explicaron que »Para algunas personas, encontrar una novia es muy difícil», así que se propusieron crear un método para que estas personas experimentasen el hecho de »agarrar la mano de su novia sin tener que encontrarla primero».
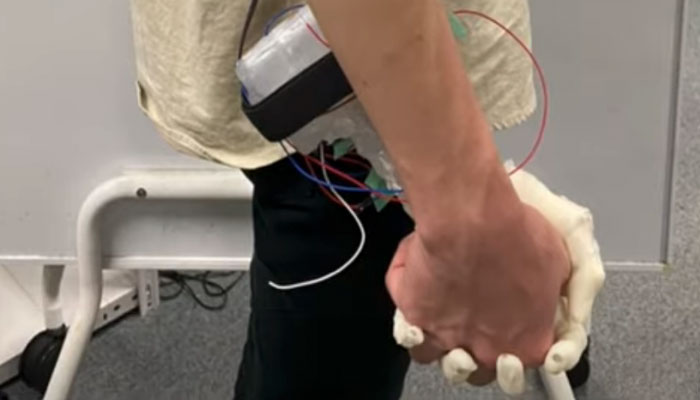
El resultado es un robot llamado “Osampo Kanojo (Novia Caminante)”.
El prototipo, que está diseñado como un sustituto de la mano de una mujer, para que podría adaptarse fácilmente para adaptar también la mano de un hombre con una capa exterior más sustancial y fragancias más características, como una colonia, carbón de barbacoa o hasta aceite de motor…


4 Comments
Leave a Reply